Researchers have developed a LiDAR intensity-enhanced 3D object detection method, improving accuracy in complex marine environments. This innovation addresses challenges in detecting small vessels, enhancing safety and efficiency for unmanned surface vehicles (USVs) by integrating point cloud intensity into existing detection frameworks.
Challenges in Maritime Navigation
As autonomous maritime navigation systems continue to evolve, the need for reliable environmental perception becomes increasingly critical. Unmanned Surface Vehicles (USVs) are gaining traction due to their cost-effectiveness and ability to operate in hazardous environments. However, the complex dynamics of marine environments, such as the effects of wind, waves, and varying object sizes, pose significant challenges for existing object detection algorithms. Current systems struggle particularly with detecting small vessels, which are crucial for collision avoidance and safe navigation.
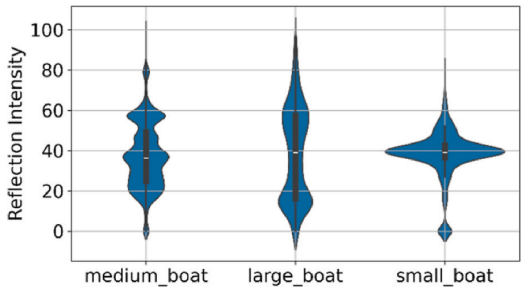
Traditional sensors used in maritime environments, including marine radar, cameras, and LiDAR, each have their limitations. Cameras, for instance, are sensitive to lighting conditions, while radar offers low resolution. LiDAR, despite its high accuracy and 360-degree measurement capability, can be affected by adverse weather conditions such as fog and rain. Moreover, existing LiDAR-based detection methods primarily focus on geometric information, often overlooking the potential benefits of incorporating point cloud intensity, which is influenced by object material and surface texture. This oversight limits the effectiveness of current detection frameworks in complex maritime scenarios.
Innovative Approach: Intensity-PointPillar
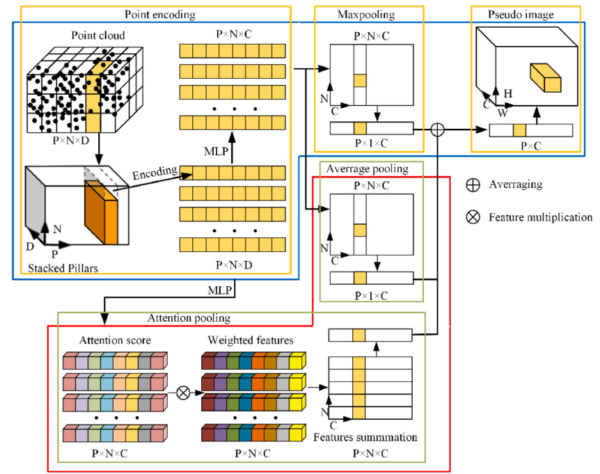
To address these challenges, the research introduces the Intensity-PointPillar method, an innovative approach that enhances the PointPillar detection network by integrating point cloud intensity information. This novel method aims to improve the feature representation capability of each pillar within the network, thereby boosting the overall object detection performance.
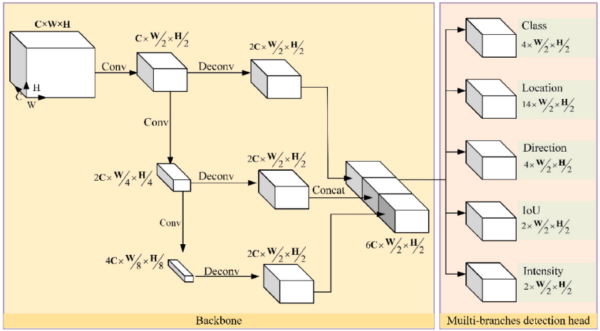
The Intensity-PointPillar method incorporates average pooling and attention pooling into the encoding network. These techniques allow for a more comprehensive consideration of local geometric details and intensity information, enhancing the network’s ability to represent features accurately. Additionally, the research introduces a multi-branch detection head and a point cloud intensity loss function. These innovations are designed to address the inconsistency between the object classification branch and the position regression branch, further refining the detection process.
The researchers trained and evaluated their method using two real-world ship LiDAR point cloud datasets. This rigorous testing ensured that the proposed method could effectively handle the diverse and challenging conditions typical of maritime environments.
Proven Results and Conclusions
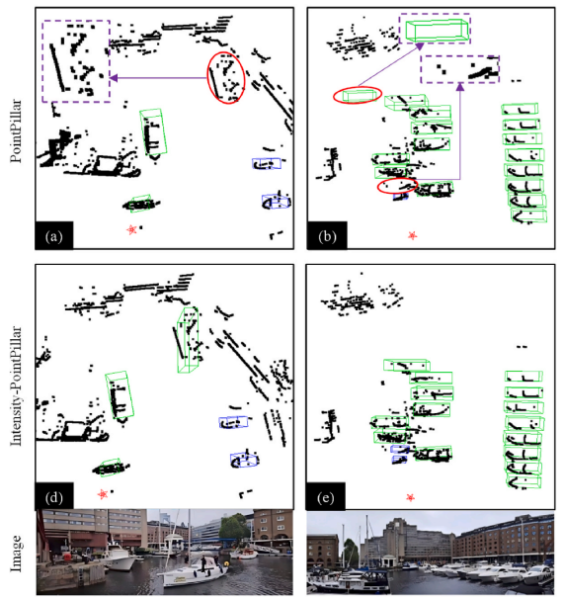
The experimental results of this study are promising, demonstrating a significant improvement in detection accuracy. The Intensity-PointPillar method achieved a mean Average Precision improvement of 31.6% compared to the original PointPillar network. This substantial enhancement validates the effectiveness of incorporating point cloud intensity into the detection process.
The research highlights the potential of the Intensity-PointPillar method to overcome the limitations of existing LiDAR-based detection systems in maritime scenarios. By addressing the challenges posed by small vessels and complex environmental conditions, this method represents a significant step forward in the field of autonomous maritime navigation.
Future Directions and Impact
The successful implementation of the Intensity-PointPillar method opens new avenues for enhancing the safety and efficiency of USVs. By improving the accuracy of object detection in challenging marine environments, this innovation could lead to more reliable autonomous navigation systems. Future research could explore the integration of this method with other sensor technologies to further enhance environmental perception capabilities.
We thank the authors for their valuable contribution to the field of maritime technology. If you have insights or further input on this topic, we encourage you to reach out and share your thoughts.
Reference: Dongdong Guo, Yong Yin, Qianfeng Jing, Zeyuan Shao, Haitong Xu. A LiDAR intensity-enhanced 3D object detection method for maritime autonomous navigation. Ocean Engineering 343 (2026) 123586. DOI: https://doi.org/10.1016/j.oceaneng.2025.123586