Researchers have deployed innovative ultra-thin surface drifters to explore the complex near-surface ocean dynamics of the southern North Sea. Utilizing machine learning models, this study provides valuable insights into the forces driving oceanic transport, enhancing predictive capabilities for environmental and maritime applications.
Understanding the Ocean’s Surface: Why It Matters
Understanding the dynamics of buoyant objects at the ocean’s surface is crucial for applications ranging from search-and-rescue operations to environmental conservation efforts. Traditional drifters face limitations due to their size, which restricts their ability to accurately mimic the transport of objects influenced by direct wind drag, surface currents, and wave-induced transport. This poses challenges in accurately predicting the pathways of floating debris, oil spills, and marine organisms, which can have significant implications for environmental protection and maritime operations.
For example, the ability to predict the drift of oil spills can mitigate environmental damage, while understanding the movement of marine debris is vital for addressing plastic pollution. This pollution threatens marine life through ingestion and entanglement and disrupts ecosystems by facilitating biological invasions and chemical contamination. The current plastic standing stock in the ocean is projected to double within two decades, further exacerbating these issues. Thus, advancing our understanding of near-surface ocean dynamics is key to improving models that predict the transport of buoyant objects, ultimately benefiting both operational oceanography and environmental management.
Innovative Approaches and Methodology
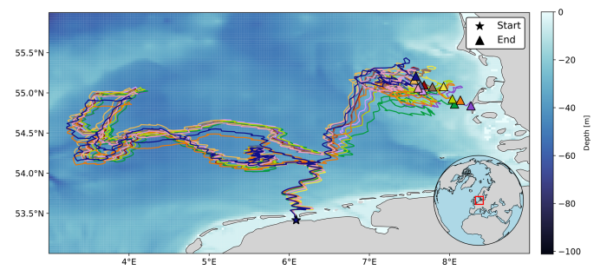
The research team from Delft University of Technology and Utrecht University adopted an innovative approach by deploying 12 ultra-thin, disc-shaped surface drifters in the southern North Sea. These drifters, designed to track the uppermost centimeters of the ocean surface, offer a novel way to capture the complex interactions of winds, waves, and currents. Equipped with Global Navigation Satellite System (GNSS) positioning and other sensors, the drifters were deployed off the coast of Moddergat, the Netherlands, and monitored over 68 days.
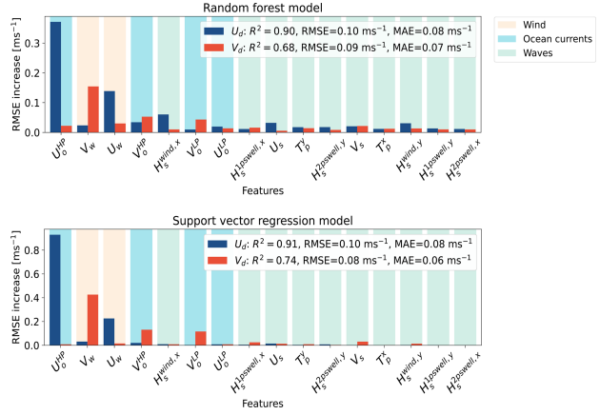
The study employed a data-driven approach to model drifter velocity using hydrodynamic and atmospheric data. Researchers applied both a traditional linear leeway parameterization and advanced machine learning models, specifically random forest and support vector regression. These machine learning models do not require explicit knowledge of the underlying transport mechanisms, making them particularly suited for complex systems with multiscale variability and non-linear interdependencies.
By analyzing the trajectories of these drifters and comparing them with model simulations, the researchers aimed to identify the dominant forces driving changes in drifter velocity. The study’s use of machine learning model-agnostic interpretation techniques revealed that tidal forcing predominantly drives zonal motion, while wind is the main driver in the meridional direction. Notably, the study uncovered a saturation effect of wind, where its contribution to drifter velocity variance decreases at higher speeds.
Key Findings and Insights
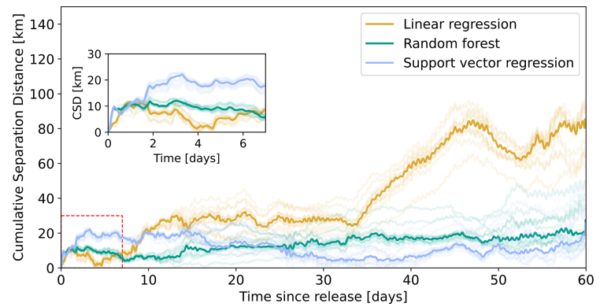
The research demonstrated that machine learning models, particularly the random forest algorithm, significantly outperformed linear models in predicting drifter trajectories. While linear models showed comparable accuracy only at short time scales, the machine learning models provided robust explanatory skill and a low degree of overfitting. The study also introduced a hybrid approach, deriving a non-linear function of wind from machine learning interpretable methods to enhance the leeway parameterization, which substantially improved the prediction accuracy of drifter trajectories.
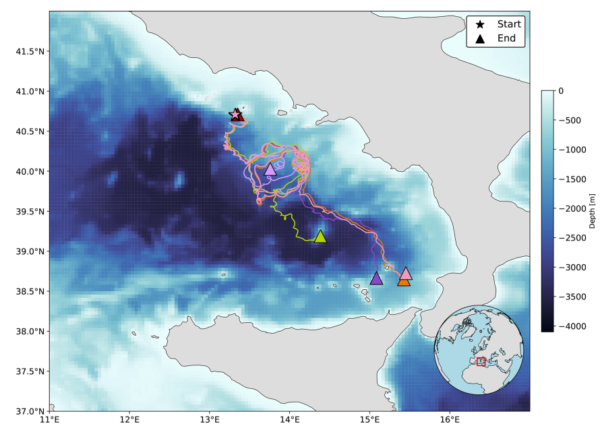
Furthermore, the generalizability of the North Sea-trained models was tested using an independent drifter dataset from the Tyrrhenian Sea. Despite the differing ocean dynamics, the machine learning models successfully reproduced observed trajectories with accuracy comparable to state-of-the-art studies, underscoring their robustness and potential for broader application.
Future Directions and Implications
This research represents a significant advancement in modeling and predicting the transport of buoyant objects in the ocean, with implications for environmental management, maritime operations, and scientific research. The successful application of machine learning models in this study opens new avenues for improving predictive models across different oceanic regions and conditions.
The findings provide a foundation for future research to explore the integration of additional environmental variables and the refinement of machine learning techniques. By continuing to enhance our understanding of near-surface ocean dynamics, we can better address pressing environmental challenges and improve the safety and efficiency of maritime activities.
We extend our gratitude to the authors for their valuable contributions to this field. If you have insights or inquiries regarding this research, we encourage you to reach out and engage with the ongoing dialogue in this exciting area of study.
Reference: Medina-Rubio, J., Nussbaum, M., Van Den Bremer, T. S., & Van Sebille, E. (2026). Using surface drifters to characterise near-surface ocean dynamics in the southern North Sea: A data-driven approach. Ocean Science, 22(1), 49-74. DOI: https://doi.org/10.5194/os-22-49-2026