This study explores enhancing real-time precise point positioning (RT-PPP) using predicted orbits and clocks from multiple Global Navigation Satellite Systems (GNSS). It demonstrates notable accuracy improvements by employing satellite-specific weighting strategies, optimizing the performance of high-stability constellations like Galileo and BDS-3.
Addressing Real-Time Positioning Challenges
Real-time Precise Point Positioning (RT-PPP) is vital for applications needing high-precision location data, such as autonomous vehicles and smartphones. Its accuracy depends on precise satellite orbits and clocks, traditionally requiring updates every five seconds due to limited prediction accuracy. This frequent updating burdens data analysis and communication systems, and interruptions can compromise service reliability. New constellations like Galileo and BDS-3, with high-stability hydrogen clocks, offer potential to extend satellite clock prediction arcs, reducing update frequency. This research investigates maintaining RT-PPP precision while minimizing reliance on real-time data streams, which are prone to disruptions, by using half-hourly predicted products for multi-GNSS RT-PPP.
Innovative Methodologies in RT-PPP
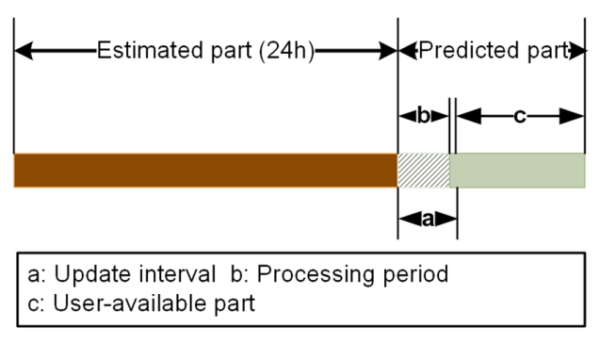
The study introduces a novel RT-PPP approach using predicted orbits and clocks from batch-processed products. Key innovations include leveraging advancements in multi-GNSS ultra-rapid precise orbit determination, allowing half-hourly satellite data updates. This provides prediction arcs of 30 to 60 minutes, reducing the need for constant real-time updates. A satellite-specific weighting strategy enhances RT-PPP accuracy, considering varying prediction accuracies of different satellite types, focusing on clock stability. By assigning weights based on performance, the method benefits from high-performing satellites like those in the Galileo constellation.
The research examines GNSS observation equations and stochastic modeling for precise point positioning. It details predicting satellite orbits and clocks, emphasizing accurate initial conditions and state transition matrices. A polynomial model with periodic terms for clock prediction effectively maintains high accuracy over extended prediction arcs.
Promising Results and Conclusions
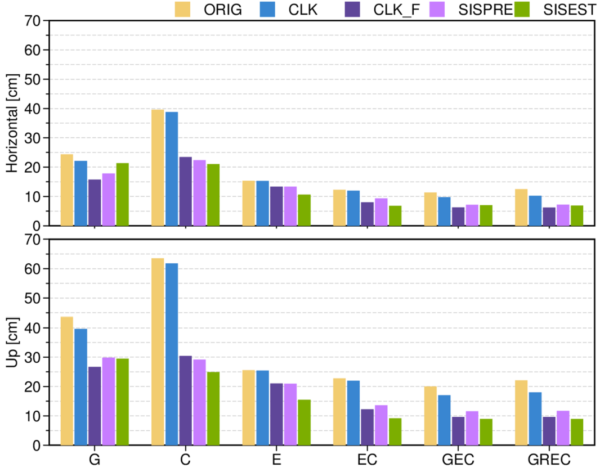
The research demonstrates achieving a 3-D accuracy of 2.9 cm for static solutions and 11.3 cm for simulated kinematic solutions using half-hourly predicted products. The satellite-specific weighting strategy significantly improves accuracy, by 15% to 60% compared to methods without such weighting or with simplified strategies. The study highlights Galileo satellites’ contribution in the quad-constellation solution due to their stable clocks, showcasing the potential of advanced satellite constellations to enhance RT-PPP accuracy and reliability. The proposed methods effectively address real-time data disruption challenges, offering a robust solution for precise positioning applications.
Future Directions and Opportunities
This research offers a pathway to more reliable and accurate real-time positioning services by reducing dependency on constant real-time data streams, enhancing RT-PPP robustness against disruptions. This has significant potential for autonomous navigation, geospatial monitoring, and other high-precision positioning fields. Future research could further optimize satellite-specific weighting strategies and integrate additional satellite constellations. The authors invite collaboration and input from the engineering community to refine and expand these findings.
Reference: Longjiang Tang, Jungang Wang, Bobin Cui, Huizhong Zhu, Maorong Ge, Harald Schuh. Multi-GNSS precise point positioning with predicted orbits and clocks. GPS Solutions (2023) 27:162. DOI: https://doi.org/10.1007/s10291-023-01499-1