Researchers from the Norwegian University of Science and Technology have developed a LiDAR SLAM-based geo-localization framework that operates independently of GNSS. This study offers a robust solution for autonomous surface vehicles navigating in dynamic harbour environments, enhancing safety and reliability in maritime operations.
Navigational Challenges in Harbour Environments
The use of Uncrewed Surface Vehicles (USVs) and Autonomous Surface Vehicles (ASVs) is on the rise, offering significant advantages over traditional crewed vehicles, such as cost-efficiency and the ability to operate in hazardous areas without risking human lives. These vehicles are increasingly employed for tasks like harbour surveillance, oceanographic surveying, and the transportation of goods and people. However, a critical challenge for ASVs, especially in harbour environments, is achieving accurate positioning. Traditionally, this has been accomplished using an Inertial Navigation System (INS) combined with a Global Navigation Satellite System (GNSS). While effective in many scenarios, GNSS-based positioning is not without its flaws. Satellite signals can be obstructed by natural or man-made structures, and electromagnetic interference can further degrade signal quality. Moreover, GNSS signals are vulnerable to jamming and spoofing, which can lead to significant positioning errors.
In scenarios where GNSS fails, the INS position estimate tends to drift over time, creating a single point of failure. This lack of robustness is a significant concern for autonomous vehicle operations, where safety and reliability are paramount. Redundancy through multiple sensor modalities has been a common solution, with recent experiments demonstrating the use of various sensors for redundant positioning in harbour environments. However, these approaches often rely on relative positioning rather than providing a global position like GNSS. This limitation can be particularly problematic in dynamic harbour environments where precise positioning is crucial for safe and efficient operations.
Innovative LiDAR SLAM Framework
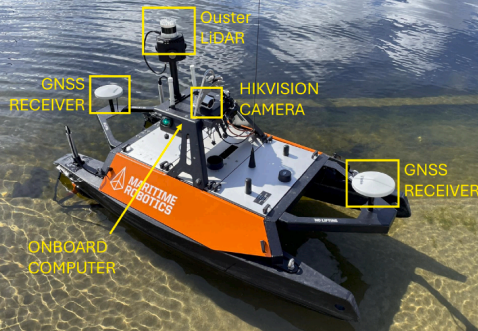
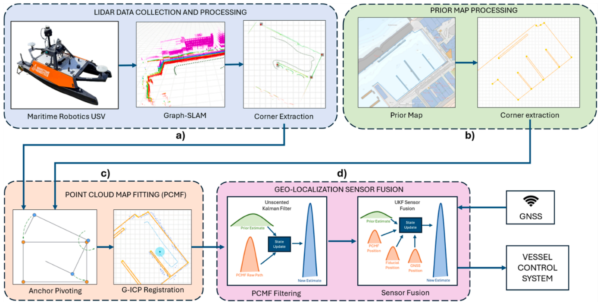
To address these challenges, the research team developed a LiDAR SLAM-based geo-localization framework that determines map-referenced positions in known harbour environments without relying on GNSS. The framework consists of four main modules: LiDAR data collection and processing, prior map processing, point cloud map fitting, and geo-localization sensor fusion. The system uses 3D LiDAR scans as its primary input, which are processed to extract useful shoreline information. The processed LiDAR data is then aligned with prior map knowledge using a combination of anchor pivoting and Generalized Iterative Closest Point (G-ICP) registration. This alignment allows the system to achieve geo-localization independently of GNSS.
The framework also incorporates an Unscented Kalman Filter (UKF) for sensor fusion, which combines the LiDAR-based position estimates with GNSS data when available. This multimodal approach enhances the system’s robustness, allowing it to maintain accurate positioning even in the presence of GNSS disturbances. The entire system is built using the Robot Operating System (ROS) and C++, ensuring adaptability and efficient real-time data processing.
Promising Results and Practical Applications
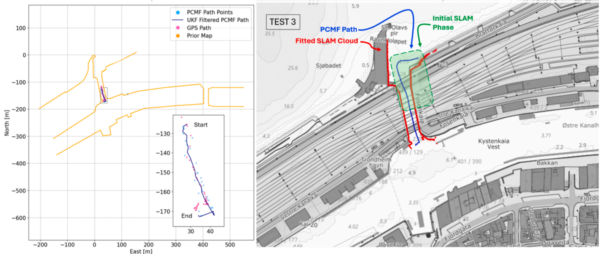
The research demonstrated that the LiDAR SLAM-based framework could achieve map-referenced positioning accuracy of 3-6 meters, with an end-to-end system latency of approximately 1.8 seconds. These results indicate the method’s practical feasibility for coastal and port operations, where traditional localization methods may be compromised. The study highlights the system’s potential to improve navigation safety and autonomy for maritime platforms, particularly in pre-vetted, well-structured harbour environments. The authors conclude that while the system may not be generalizable to all land structures, it offers valuable redundant positioning capabilities in specific maritime contexts.
Future Directions and Collaborative Opportunities
This innovative approach to GNSS-independent geo-localization has significant implications for the future of autonomous maritime operations. By providing a reliable alternative to GNSS-based positioning, the framework enhances the robustness and safety of ASVs operating in dynamic harbour environments. The study opens the door for further research into integrating additional sensor modalities and improving the system’s adaptability to various environmental conditions. The authors invite collaboration and input from other researchers and industry professionals interested in advancing this promising technology.
Reference: Eirik E. Semb, Kim Alexander Christensen, Martin Steinert. Feasibility of GNSS independent harbour geo-localization via LiDAR SLAM and prior maps. Ocean Engineering 355 (2026) 125100. DOI: https://doi.org/10.1016/j.oceaneng.2026.125100