Researchers at Delft University of Technology have developed a hybrid programmable morphing structure using shape memory materials. This advancement in soft robotics enables systems to adapt to dynamic environments with enhanced flexibility and functionality, overcoming traditional limitations of single-material actuators.
Soft Robotics: Challenges and Solutions
Soft robotics is poised to transform robotic interactions, particularly in unstructured or dynamic environments. The main challenge is creating systems that balance flexibility and stiffness, perform multiple functions, and adapt to changing conditions. Traditional rigid robots, while precise, often lack the adaptability needed for complex tasks, making them unsuitable for applications requiring gentle interaction with delicate objects or navigation through unpredictable terrains.
Smart materials, especially shape memory materials (SMMs), offer promising solutions. These materials can remember and return to a predefined shape in response to specific stimuli, such as temperature changes. However, actuators that rely solely on a single type of SMM, like shape memory alloys (SMAs) or shape memory polymers (SMPs), face limitations. SMAs excel in actuation but struggle with providing variable stiffness, while SMPs are lightweight and biocompatible but limited to passive shape changes.
Integrating multiple SMMs into a single structure aims to harness the strengths of each material while compensating for their individual weaknesses. The challenge lies in achieving effective coordination between actuation and stiffness regulation within such a hybrid structure, crucial for practical applications in soft robotics.
Hybrid Structure: A New Approach
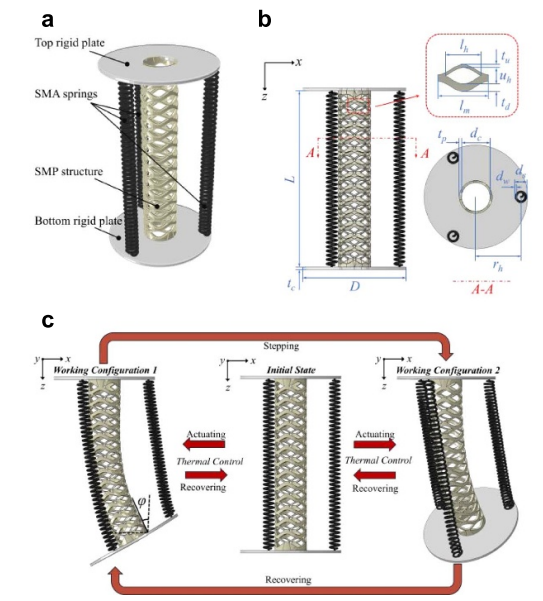
The research by Qianyi Chen and colleagues introduces a hybrid programmable morphing structure combining SMAs and SMPs. This design integrates SMA springs and an SMP cylindrical core into a single unit, allowing for cooperative actuation and adaptive stiffness variation. The SMA springs serve as thermally activated actuators, generating deformation in response to temperature changes. Meanwhile, the SMP core utilizes its shape memory effect to achieve reversible shape locking and acts as a thermal switch, enabling controlled stiffness variation through temperature regulation.
The team developed a coupled numerical model to describe the interaction between the SMA and SMP components, validated through experimental testing. This model demonstrated the feasibility and repeatability of the proposed design. The hybrid structure achieved a maximum bending angle of 55 degrees under dual-SMA actuation and 42 degrees under single-SMA actuation, along with its capacity to maintain any intermediate shape during thermal cycling.
The shared thermal driving system for both SMA and SMP materials allows for alternate heating and cooling, enabling the structure to stop and restart instantly. This capability distinguishes the design from previous models that could only lock at maximum deformation. The structure’s ability to lock and sustain any intermediate shape and then resume motion from that state represents a significant advancement in programmable morphing structures.
Key Findings and Impact
The study highlights the significant improvements achieved with the hybrid structure. The system demonstrated a reversible six-fold increase in stiffness and a motion range extending up to three times its original length. These enhancements mark a substantial improvement over conventional single-material soft actuators, which are typically limited in their deformation modes and stiffness variation capabilities.
The hybrid structure’s ability to perform programmable and tailored deformation responses provides a higher degree of freedom compared to existing hybrid structures, which generally achieve only uniaxial or planar motions. This flexibility opens up new possibilities for practical applications, such as adaptive grasping, reconfigurable locomotion, and environmental exploration.
Future Directions and Applications
The innovative integration of SMAs and SMPs into a single morphing structure offers a flexible strategy for programmable morphing, demonstrating scalable applicability in various engineering domains. The framework established by this research provides a foundation for developing multifunctional soft robotic systems capable of autonomous adaptation to environmental stimuli.
This study not only advances the field of soft robotics but also sets the stage for future research into more complex and capable robotic systems. The authors invite further exploration and collaboration to enhance the capabilities and applications of programmable morphing structures.
Reference: Chen, Q., Wu, R., Schott, D., & Jovanova, J. (2026). Programmable structure with shape memory materials for soft robotics. Smart Materials and Structures, 35(1), Article 015049. DOI: https://doi.org/10.1088/1361-665X/ae2a85